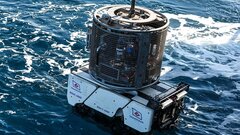

Дистанционно управляемый аппарат класса ROV C 4000 совершил погружение на глубину более 2400 метров у берегов Франции, чтобы обследовать и задокументировать затонувшее торговое судно «Камара 4», покоившееся на дне Средиземного моря пять столетий. За одну миссию робот сделал десятки тысяч снимков (до 8 кадров в секунду), которые затем были объединены в детальные 3D-модели.
С помощью прецизионных манипуляторов аппарат извлек керамические артефакты, не нарушив хрупкой структуры обломков. Операция проходила при давлении до 150 атмосфер (почти 150 тонн на квадратный метр), в полной темноте и температуре, близкой к нулю. Это одна из самых глубоких подводных археологических экспедиций во Франции по раскопке на предельных глубинах.
ROV C 4000 управляется с вспомогательного судна через бронированный кабель (длина — несколько километров). Спуск до дна занимает около часа. Аппарат оснащен:
- Системой навигации на основе камер — без GPS на такой глубине робот ориентируется по видеопотоку и инерциальным датчикам;
- Камеры высокого разрешения — до 8 кадров в секунду, общее количество снимков за миссию — 86 000;
- Манипуляторы с тактильной обратной связью (на уровне оператора) — позволяют поднимать хрупкие керамические кувшины, не повреждая их и не поднимая осадочных пород;
- Усиленный герметичный корпус — выдерживает давление, при котором обычная электроника раздавливается.
Операторы видят изображение в реальном времени с небольшой задержкой (доли секунды) и управляют каждым движением манипуляторов. Видимость на глубине оказалась «превосходной», по словам археологов — практически невозможно поверить, что съемка ведется на 2,4 км ниже поверхности.
Затонувшее судно — торговый корабль XVI века, перевозивший керамику и металлические грузы по средиземноморским маршрутам. Такие находки на глубине более 2 км крайне редки, поскольку водолазы, мелководные батискафы там бесполезны.
Это один из самых глубоко залегающих объектов, когда-либо поднятых с затонувшего корабля во Франции. У нас нет подробных текстов о торговых судах XVI века, поэтому это ценный источник информации по морской истории, — отметила ведущий археолог проекта Марин Садания.
Аппарат не просто извлек объекты, но и создал цифровую 3D-модель места крушения — ее можно изучать в лаборатории, не возвращаясь на дно. Кроме того, робот способен повторно посещать одни и те же участки, отслеживая изменения или проводя новые извлечения.
Такие глубоководные системы найдут применение не только в археологии, но и в инспекции подводных кабелей и трубопроводов, поиске полезных ископаемых, мониторинге захоронений боеприпасов и экологических катастроф.
Читайте также нашу статью о том, как редкий японский самолет подняли со дна океана
Источник: hi-tech.mail.ru