Новый геометрический подход от швейцарских специалистов решает проблему работы роботов с неправильными формами. Технология позволяет переносить навыки между объектами и устойчива к ошибкам камеры.
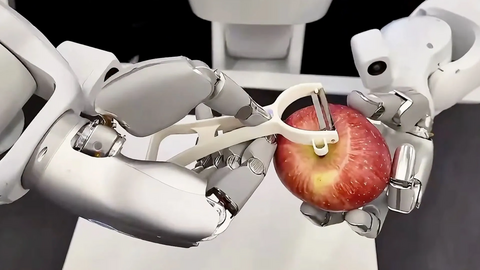
Роботы часто легко справляются с объектами правильной формы, например, с коробками, но испытывают трудности, если предмет имеет сложную или неправильную геометрию — как, например, яблоко или банан. Однако теперь эта проблема может быть решена, пишет Tech Xplore.
Специалисты из Швейцарского федерального технологического института в Лозанне (EPFL) и института Idiap разработали новый подход, позволяющий роботам надежно манипулировать объектами любой формы. Суть метода — обучение роботов учитывать уникальную геометрию каждого предмета, с которым они сталкиваются.
Для человека такие задачи, как чистка картофеля или мытье посуды, не представляют труда. Для роботов же это вызов: объекты вроде чашек, фруктов или инструментов различаются по форме, размеру и кривизне поверхности. Традиционные алгоритмы позволяют работать только с ограниченным набором форм, а обобщение на множество неправильных объектов до сих пор оставалось сложной задачей.
Новая система, предложенная учеными, основана на геометрическом подходе. Робот с помощью стереокамеры строит трехмерную карту объекта, после чего формирует облако координат, служащее ориентиром для манипулятора. Благодаря этому машина может определять, как двигаться по поверхности любого предмета. Важное преимущество — возможность переноса навыков: освоив задачу на одном объекте, робот может применить тот же навык к совершенно другой форме без повторного обучения.
Источник: hi-tech.mail.ru