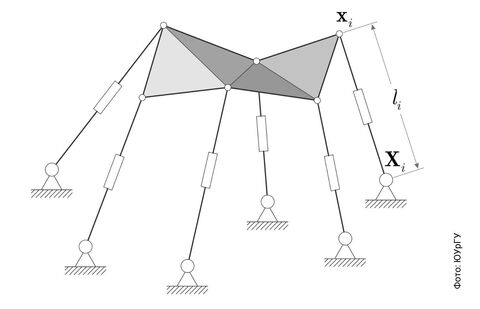
Доцент Южно-Уральского государственного университета Евгений Мартюшев разработал новый алгоритм для расчета движения платформы Стюарта-Гофа. Такие платформы стоят на шести «ножках», которые могут независимо удлиняться и укорачиваться, позволяя платформе двигаться во всех направлениях и наклоняться. Эти «избушки», как пишут СМИ, используются в авиасимуляторах, хирургических роботах, роботизированных манипуляторах, радиотелескопах и тактильных устройствах.
Главная задача инженеров — точно определить положение и ориентацию платформы, зная длины всех шести ножек. Ранее решения сводились к сложным системам уравнений с десятками возможных вариантов. Существующие методы были либо быстрыми, но неточными, либо точными, но медленными.
Алгоритм Мартюшева сочетает скорость и точность. Он работает на стандартных операциях линейной алгебры. Реализации доступны на MATLAB, Julia и Python на GitHub, а корректность подтверждена экспериментальными данными.
Источник: www.ferra.ru