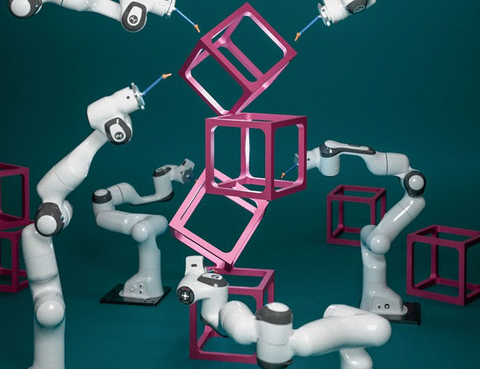
Google DeepMind совместно с University College London и компанией Intrinsic представила алгоритм RoboBallet, который позволяет нескольким роботам синхронно выполнять задачи в одном пространстве без столкновений.
В эксперименте участвовали восемь манипуляторов, способных решать по 40 разных задач. Алгоритм сам распределял работу между ними и прокладывал безопасные траектории. Обучение происходило в симуляции, после чего система сразу применялась в реальных условиях — без дополнительной настройки (zero-shot).
Пока RoboBallet ограничен задачами перемещения предметов, но архитектура позволяет масштабировать подход. В будущем можно будет добавить более сложные операции, зависимости между действиями и разные типы роботов.
Разработка показывает, как методы обучения с подкреплением могут превратить группу машин в слаженную команду, открывая путь к гибкой автоматизации в производстве и логистике.
Делегируйте часть рутинных задач вместе с BotHub! Для доступа к сервису не требуется VPN и можно использовать российскую карту. По ссылке вы можете получить 100 000 бесплатных токенов для первых задач и приступить к работе с нейросетями прямо сейчас!
Подробнее
Источник: habr.com