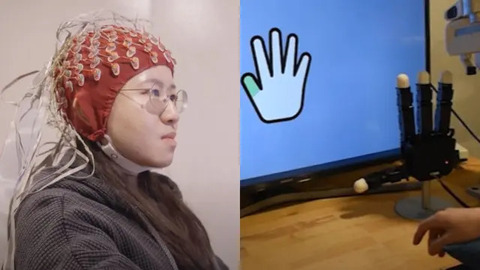
Исследователи из Университета Карнеги-Меллон совершили большой прорыв в области неинвазивных технологий интерфейса мозг-компьютер (ИМК). Используя электроэнцефалографию (ЭЭГ), они сделали возможным управление роботизированной рукой в режиме реального времени на уровне отдельных пальцев.
Команда под руководством профессора Бин Хе разработала систему, которая позволяет пользователям управлять пальцами роботов, просто представляя себе их движения. Добровольцы смогли выполнять задания, шевеля двумя и тремя пальцами роборуки, не двигая при этом ни одним мускулом.
«В нашем исследовании испытуемые смогли успешно выполнить задачи по управлению несколькими пальцами, просто подумав об этом», — говорит Бин Хе, профессор биомедицинской инженерии Университета Карнеги-Меллон.
«Это было достигнуто с помощью новой стратегии декодирования с глубоким обучением и механизма тонкой настройки сети для непрерывного декодирования из неинвазивных сигналов ЭЭГ», — отмечается в исследовании.
Бин Он потратил более двух десятилетий на разработку неинвазивных ИМК. В его лаборатории уже были созданы первые беспилотные летательные аппараты, роботизированные руки и роботизированные манипуляторы, управляемые с помощью ЭЭГ. Последнее достижение приближает технологию к практическому, повседневному использованию.
«Улучшение функции рук является первоочередной задачей как для людей с нарушениями, так и для трудоспособных людей, поскольку даже небольшие успехи могут значительно улучшить способности и качество жизни», — сказал он. В отличие от хирургических имплантатов ИМК, эта система является внешней, не связана с риском и может быть адаптирована к различным условиям. Это расширяет возможности её использования для более широких слоёв населения, включая людей с двигательными нарушениями или восстанавливающихся после травм.
Источник: habr.com