Исследователи Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института объединили инструменты генеративного искусственного интеллекта и движок физического моделирования для усовершенствования конструкций роботов. В результате они получили робота, который превзошёл по своим возможностям разработанного людьми.
Модели GenAI благодаря подходам на основе диффузии могут создавать новые проекты, а затем оценивать их в моделировании. Новый подход применяет эти возможности для улучшения конструкций роботов, созданных людьми. Пользователи могут создать 3D-модель робота и указать, какие части они хотели бы изменить с помощью диффузионной модели, заранее указав её размеры. Затем GenAI организует брейнсторминг и проверяет свои идеи в симуляции. Когда система находит правильный дизайн, его можно сохранить, а затем изготовить работающего реального робота с помощью 3D-принтера без дополнительных настроек.
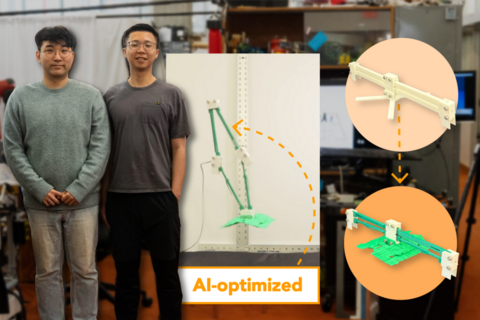
Исследователи использовали этот подход для создания робота, который подпрыгивает в среднем на 0,6 м или на 41% выше, чем аналогичная машина, которую они создали самостоятельно. При этом роботы почти идентичны по внешнему виду: оба сделаны из типа пластика, называемого полимолочной кислотой.
При более близком рассмотрении становится видно, что созданные ИИ связки робота изогнуты и напоминают толстые барабанные палочки, тогда как соединительные части стандартного робота прямые и выполнены в форме прямоугольников.
Исследователи начали совершенствовать своего прыгающего робота, выбрав 500 потенциальных конструкций с использованием начального вектора внедрения — числового представления, которое фиксирует высокоуровневые характеристики для выбора оптимальной. Они выбрали 12 лучших вариантов на основе производительности в моделировании и использовали их для оптимизации вектора внедрения.
Этот процесс повторялся пять раз, постепенно направляя модель ИИ к созданию лучших конструкций. Полученная в итоге версия напоминала каплю, поэтому исследователи побудили систему масштабировать проект, чтобы он соответствовал их 3D-модели. Затем они изготовили форму и обнаружили, что она улучшила способности робота к прыжкам
Преимущество использования моделей диффузии заключается в том, что они могут находить нетрадиционные решения для усовершенствования роботов.
«Мы хотели, чтобы наша машина прыгала выше, поэтому решили, что можем просто сделать звенья, соединяющие её части, как можно тоньше, чтобы они стали легче. Однако такая тонкая структура может легко сломаться, если мы просто используем 3D-печатный материал. Наша диффузионная модель предложила лучшую идею в виде уникальной формы, которая позволяла роботу запасать больше энергии перед прыжком, не делая его звенья слишком тонкими. Эта креативность помогла нам узнать о базовой физике машины», — отметили авторы работы.
Затем команда поручила системе разработать оптимизированную робоногу, чтобы обеспечить безопасное приземление. Они повторили процесс оптимизации, в конечном итоге выбрав наиболее эффективную конструкцию. Учёные обнаружили, что спроектированная ИИ машина падала гораздо реже, чем базовая версия, продемонстрировав улучшение по этому показателю на 84%.
Чтобы создать робота, который мог бы высоко прыгать и стабильно приземляться, исследователи решили найти баланс между обеими целями. Они представили как высоту прыжка, так и показатель успешности приземления в виде числовых данных, а затем обучили свою систему находить середину между обоими векторами.
Хотя ИИ-робот превзошёл спроектированного человеком, его будут улучшать и далее. Нынешняя итерация включала использование материалов, совместимых с 3D-принтером, но будущие версии смогут прыгать ещё выше с внедрением более лёгких материалов.
Исследователи говорят, что проект является отправной точкой для создания новых конструкций робототехники, в которых может помочь генеративный ИИ. «Представьте себе использование естественного языка для управления диффузионной моделью при проектировании робота, который может поднять кружку или управлять электродрелью», — отмечают они.
В 2022 году исследователи робототехники из CSAIL уже использовали моделирование на базе искусственного интеллекта, чтобы быстро научить робота-гепарда адаптировать свой стиль ходьбы к обстоятельствам. Обучение бегу позволило роботу установить новый рекорд скорости.
Источник: habr.com