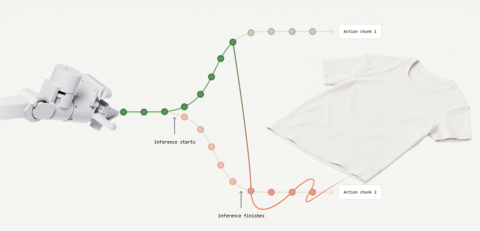
Наглядное изображение архитектуры алгоритма RTC. Поток восприятия окружающей среды непрерывно обновляет планирование следующих кусков действий, в то время как текущий выполняется
Мы все ждем роботов‑помощников по дому — чтобы и носки сложили, и спичку чиркнули, и кабель воткнули без миллиона попыток. Но есть проблема: пока мозги робота думают над идеальным планом захвата футболки, сама футболка под действием гравитации или неуклюжей лапы уже успевает превратиться в бесформенную тряпку.
Знакомо? Исследователи из Калифорнийского университета в Беркли тоже с этим столкнулись и решили, что так не пойдет. В результате возник Real‑Time Chunking (RTC) — новый алгоритм, который учит ИИ‑роботов реагировать на изменения в реальном мире в режиме реального времени.
В чем суть проблемы?
Представьте робота, складывающего одежду. Его ИИ‑мозг строит красивый план: «Вот сейчас я схвачу уголок, потом переложу сюда, потом аккуратненько сложу…» Но пока он прокручивает этот план в голове, физический мир не стоит на месте — ткань сползает, мякнет, перекашивается под весом манипулятора. Итог: план красивый, а результат — комок тряпья.
Выход есть: Real-Time Chunking (RTC)
Идея RTC гениальна в своей простоте: алгоритм позволяет ИИ не зацикливаться на одном долгом плане — вместо этого он разбивает задачу на небольшие, быстро выполнимые куски. Главная фишка: пока выполняется текущий chunk действия, RTC уже анализирует изменившуюся обстановку и корректирует следующий. Как если бы вы вели машину: вы не строите раз и навсегда план всей поездки до деталей, а постоянно подруливаете, реагируя на дорожную ситуацию прямо сейчас. При этом общая стратегия — «ехать прямо по этой улице» — сохраняется.
И это работает. Смотрите сами…Зажигаем свечу
Слева — робот с RTC. Чиркает спичкой, поджигает ее, аккуратно подносит к фитилю свечи — успех! Справа — классический подход, где спичка не загорается. RTC рулит!
Втыкаем LAN-кабель
Казалось бы, проще простого? Но и тут RTC (слева) оказался шустрее классики (справа). Меньше раздумий — больше действия!
Складываем одежду
Тот самый больной вопрос. Слева — RTC: одежда сложена несколько раз, довольно аккуратно. Справа результат больше похож на попытку смять одежду в комок, причем неудачную.
Эффективность
На графике ниже видно: по горизонтали — время, которое ИИ тратит на расчет одного действия (чем правее, тем дольше думает). По вертикали — сколько задач робот может выполнить в минуту. Желтая линия (RTC) — стабильно высокая эффективность, даже когда расчеты усложняются. Серая линия (классика) — чем дольше думает, тем меньше успевает сделать. RTC позволяет роботу сочетать размышления и действия без потери скорости.
Что дальше?
Команда из Беркли не собирается останавливаться: следующий шаг — научить RTC еще более сложным сценариям, например когда роботу нужно полностью остановить текущее действие, чтобы глубже подумать над неожиданно возникшей проблемой. Представьте: робот видит, что спичка сломалась, останавливается, осознает это и решает взять новую.
Хотите быть в курсе новостей из мира ИИ? Подписывайтесь на наш телеграм‑канал BotHub AI News!
Источник: habr.com