Учёные представили новую систему управления роботами, которая не только анализирует текущее окружение, но и предсказывает его изменения, адаптируясь к ним в реальном времени. Это стало возможным благодаря сочетанию предиктивной сенсорики, генеративных моделей поведения и самообучающихся архитектур управления на основе аппаратных искусственных нейронных сетей (ANNs).
Ранее системы управления роботами работали по двум основным принципам: жёстко запрограммированные сценарии или обучение на основе исторических данных. Однако оба подхода ограничены: первый не позволяет роботу адаптироваться к изменяющимся условиям, а второй требует длительного обучения и не подходит для работы в ситуациях, когда заранее неизвестно, с какими изменениями столкнётся робот.
Разработчики предложили трёхуровневую систему адаптации:
Предиктивная сенсорика – основа новой технологии. Робот использует несколько каналов сбора данных (лидар, ультразвук, оптические камеры, инфракрасные датчики), которые анализируют не только текущее состояние среды, но и динамику её изменений. Алгоритмы на основе фильтра Калмана и байесовского прогнозирования позволяют системе предугадывать развитие событий. Например, если робот движется в толпе людей, он не просто фиксирует пешеходов перед собой, а предсказывает их возможные перемещения и заранее корректирует свою траекторию.
Генеративные модели поведения – в отличие от традиционного подхода, когда роботы следуют заранее предопределённым маршрутам, новая система способна создавать уникальные стратегии передвижения в зависимости от условий. Это достигается за счёт использования глубоких нейронных сетей, обученных на миллионах сценариев симуляций. Например, в промышленной среде робот может предсказывать возможные сбои оборудования и перестраивать производственный процесс, минимизируя потери времени.
Самообучающаяся архитектура управления – робот не просто корректирует свои действия, а активно улучшает алгоритмы работы на основе полученного опыта. Использование методов глубинного обучения с подкреплением (Deep Reinforcement Learning) позволяет системе обучаться в реальном времени. Это значит, что каждый робот становится умнее с каждым новым заданием, а его способность к адаптации со временем увеличивается.
Аппаратная основа технологии
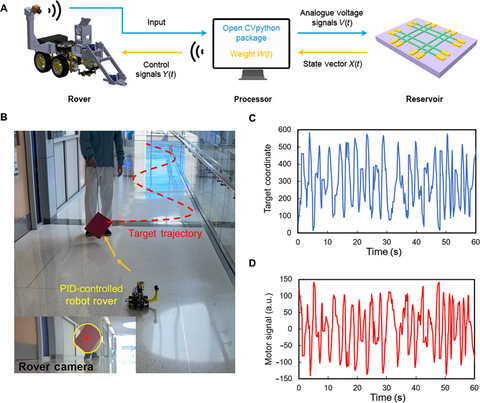
Для решения задачи энергопотребления были разработаны различные аппаратные искусственные нейронные сети (ANNs), стремящиеся преодолеть внутренние ограничения программных аналогов и создать вычислительные системы путем эмуляции биологических нейронных сетей в человеческом мозге. Например, ANNs на основе мемристоров показали более высокую энергоэффективность, чем традиционные методы цифровых вычислений в некоторых задачах. Мемристор — это двухконтактное электронное устройство, которое может быть модулировано для различных состояний проводимости. В зависимости от характеристик сохранения состояний проводимости мемристоры можно разделить на две группы: энергонезависимые (NVM) и динамические (DM). Однако такие ANNs не подходят для обработки данных, включающих временные ряды, поскольку они в основном функционируют как сети прямого распространения. Для таких случаев применяют рекуррентные нейронные сети (RNN). Программная реализация RNN обычно требует значительных затрат энергии. В исследовании была представлена реализация RNN — резервуарные вычисления (RC). RC представляет собой структуру машинного обучения, которая направлена на эффективную обработку временных данных с использованием фиксированной, случайно инициализированной RNN, называемой резервуаром, и, следовательно, она отличается низкой стоимостью обучения. В отличие от традиционных RNN, сети RC требуют обучение только для слоя считывания, чтобы соотнести векторы состояния резервуара с ожидаемыми выходными сигналами. В исследовании говориться о мемристивной сети на основе резервуара, изготовленного из слоистого полупроводника Bi2Se3, способного обрабатывать аналоговые временные сигналы, и реализации этого RC-устройства для управления двумя роботизированными системами с пониженным энергопотреблением.
Как это реализовано
Исследователи протестировали систему на нескольких реальных платформах. Одной из них стала автономная мобильная платформа для складской логистики, которая перемещала грузы в условиях постоянно изменяющегося потока людей и машин. Благодаря предиктивному управлению она смогла на 42% эффективнее избегать столкновений по сравнению с традиционными алгоритмами навигации.
Другая тестовая площадка – хирургическая роботизированная установка, способная предугадывать малейшие изменения в мягких тканях пациента во время операции. Это позволило сократить микроскопические колебания инструмента и снизить вероятность ошибки.
Перспективы и возможные применения
Прорывная система управления открывает новые возможности в различных сферах:
Промышленность – автономные роботы смогут не только выполнять задания, но и анализировать состояние оборудования, предсказывать поломки и минимизировать простои.
Логистика – интеллектуальные системы управления улучшат маршрутизацию складских роботов, снижая затраты на транспортировку и повышая безопасность.
Автономный транспорт – автомобили с такой системой смогут прогнозировать действия пешеходов и других участников движения, снижая риск аварий.
Медицина – роботизированные ассистенты смогут адаптироваться к состоянию пациента в режиме реального времени, повышая точность и безопасность хирургических операций.
Разработчики уверены, что их технология станет основой нового поколения роботизированных систем. Вместо машин, работающих строго по заранее заданным алгоритмам, мир получит адаптивные, самообучающиеся устройства, способные по-настоящему понимать и прогнозировать изменения окружающей среды.
Источник: habr.com