Ученые Колумбийского университета разработали подводного робота AquaBot, который способен автономно выполнять задачи по манипуляции объектами под водой. Новый робот использует технологию самообучения для улучшения своей работы в сложных условиях подводной среды.
AquaBot создан на основе подводного дрона QYSEA V-EVO, оснащенного захватом и камерами для получения изображений под водой. Робот обучается с использованием данных, полученных из демонстраций человека, и совершенствует свои навыки с помощью оптимизации на основе обратной связи.

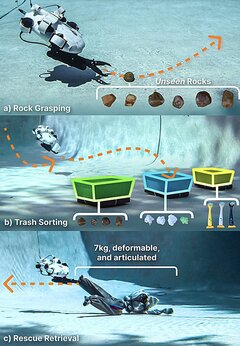
В ходе экспериментов AquaBot продемонстрировал высокую эффективность в различных задачах, таких как захват камней, сортировка мусора и извлечение объектов. Важно, что робот выполняет эти задачи быстрее человека, а его способность к самообучению позволяет ему совершенствоваться с каждым опытом.
Исследования показали, что AquaBot значительно превосходит человека по скорости выполнения задач, улучшая свою работу на 41%. Открытый доступ к программному обеспечению и оборудованию робота позволяет другим ученым продолжить разработки и тестирование в реальных условиях, что откроет новые возможности для использования робота в спасательных операциях и очистке морского дна.