Исследователи из Федеральной политехнической школы Лозанны (EPFL) в Швейцарии разработали шарнирную роборуку, которая способна расширять радиус своего действия, отсоединяясь от основы и ползая самостоятельно.
В своём проекте исследователи использовали генетический алгоритм и симулятор MuJoCo. Целью исследования была разработка бимодальной роботизированной руки с расширенными возможностями захвата, включая периодическую независимость от основы, к которой она прикреплена.
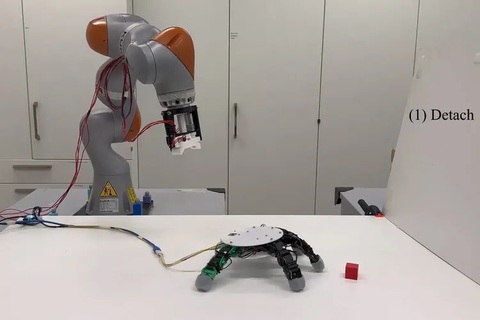
Рука получила пять пальцев, расположение которых похоже на человеческое, и магнитный соединитель на запястье, что позволяет ей отсоединяться от основы и присоединяться к ней автономно.
Пальцы роботизированной руки могут сгибаться в обоих направлениях. Благодаря этому устройство может, например, использовать часть из них для захвата предметов, в то время как остальные функционируют как ноги.
Как отмечает The Verge, разработку можно использовать в тандеме с другими роботами, такими как Spot от Boston Dynamics. У Spot уже есть собственная роборука, но с шарнирной рукой, которая работает независимо, он мог бы лучше выполнять задачи, предполагающие исследование труднодоступных мест.
Источник: habr.com