Ученые из Университета Гонконга разработали новый фреймворк AGRNav для улучшения автономной навигации роботов в средах, где часть окружающего пространства легко заслоняется объектами. Этот фреймворк показал перспективные результаты как в симуляциях, так и в реальных экспериментах.
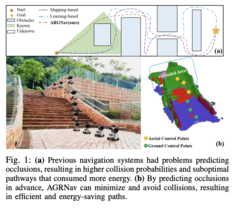
AGRNav представляет собой систему, состоящую из двух основных компонентов: легкой сети семантического заполнения сцены (SCONet) и иерархического планировщика пути. SCONet предсказывает распределение препятствий в окружении и их семантические особенности с помощью глубокого обучения, в то время как иерархический планировщик использует эти прогнозы для планирования оптимальных, энергоэффективных путей для робота.
Фреймворк позволяет роботам безопасно и экономно двигаться в различных средах, таких как леса и крупные здания. Он обеспечивает точные прогнозы препятствий и позволяет роботам находить оптимальные пути с минимальным энергопотреблением.
AGRNav успешно превзошел все базовые и передовые фреймворки навигации роботов, предложив оптимальные и энергоэффективные пути для робота как в симуляциях, так и на практике.