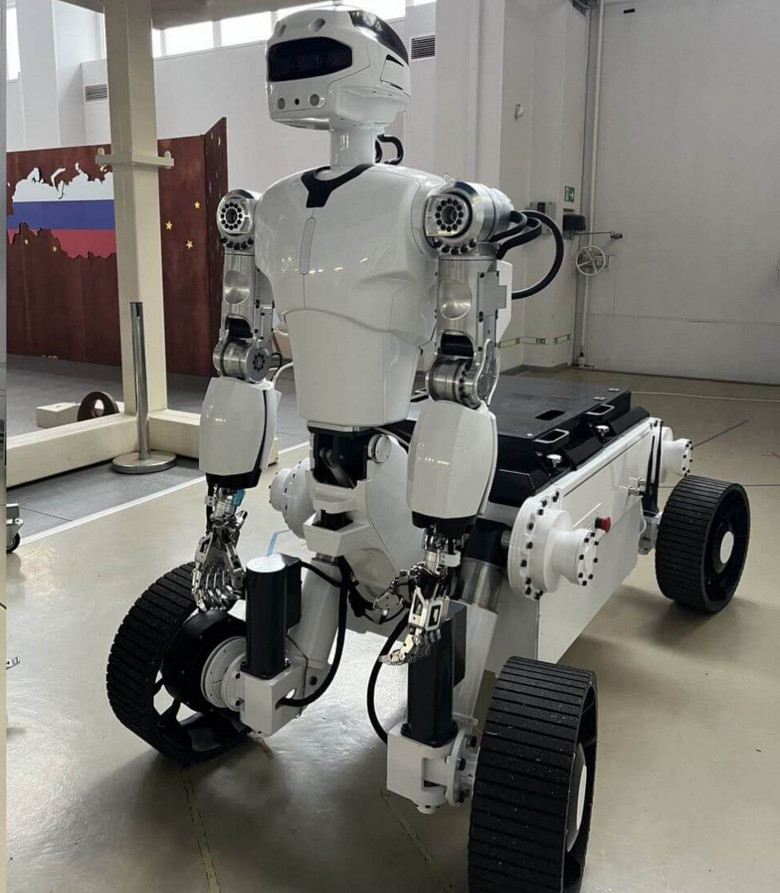
Специалисты НПО «Андроидная техника» и фонда Alpha Robotics Venture работают над созданием робота-кентавра с человекоподобным торсом на четырёхколесной платформе. Готовую разработку впервые презентовали на конференции «Пилотируемые полёты в космос» в середине ноября 2023 года. Также в конструкцию планируют включить летающий дрон, который значительно расширит возможности системы, пишет «Мир робототехники».
Как отметили специалисты, робот предназначен для отработки технологий напланетных антропоморфных робототехнических систем. Он будет выполнять различные вспомогательные задачи. Для управления аватаром с Земли будут использовать комплекс, состоящий из VR-шлема и экзоскелета.
С помощью такого контроля можно решать практически любые задачи на поверхности Луны, отметили разработчики. Также специалисты изучают возможность установки на колесную часть дополнительного манипулятора, который сможет контролировать объекты в радиусе 5 м и в случае необходимости помогать торсовой части или ремонтировать самого себя.
Основными задачами андроида станут строительство лунной базы и её подготовка к прибытию экипажа. Чтобы платформа могла передвигаться по поверхности, каждое из четырёх колес будет работать независимо от других. Также колеса смогут поворачиваться вокруг своей оси. Такая конструкция даст возможность существенно повысить манёвренность.
Сами колеса будут сильно отличаться от тех, которые используют на Земле. Их оснастят нестираемым протектором из титана и «вечными» подшипниками. Даже если одно или два колеса выйдут из строя, оставшиеся позволят платформе продолжить работу. О том, чтобы отправить на другие планеты роботов‑кентавров на шагающей тележке, в Роскосмосе говорят уже давно.
«Это будет шагающая колесная тележка, которая может и катиться, и переступать через препятствия. Выглядеть это будет так: колёса с гребущими лопатками или перфорированные колёса крепятся на шарниры, которые в случае необходимости могут двигаться, и тогда платформа способна переползти через камни, «перешагнуть» через трещины», — рассказывал в ноябре 2019 года исполнительный директор Роскосмоса по перспективным программам и науке Александр Блошенко.
По словам специалиста, опытный образец такой тележки создали ещё в СССР в Центральном научно-исследовательском институте робототехники и технической кибернетики в Ленинграде, его концепция взята за основу. Блошенко подчеркнул, что гусеничные платформы для Луны, к примеру, не подойдут. В таком шасси большое число роликов, а лунный реголит будет быстро приводить такую платформу в негодность.
Главной космической разработкой НПО «Андроидная техника» на сегодняшний день является робот «Фёдор», который в 2019 году совершил полный цикл полёта в космос. Сейчас магнитогорское предприятие по заказу РКК «Энергия» разрабатывает торсового антропоморфного робота «Теледроид» для выполнения научных экспериментов на модуле МЛМ МКС, а также на перспективной станции.
«„Теледроид“ — это следующая итерация „Фёдора“. Мы сейчас, разрабатывая его, учитываем требования к жёстким условиям космоса. И дальше, отработав все элементы, связанные с управлением, взаимодействием человека и робота в безвоздушной среде, автоматические и полуавтоматические режимы, мы в дальнейшем, конечно, рассматриваем применение этих технологий на Луне», — отметил исполнительный директор НПО «Андроидная техника» Евгений Дудоров.
Источник: habr.com