Исследователи предложили новую стратегию сборки формы роя роботов, основанную на идее исследования среднего сдвига: когда робот оказывается в окружении соседних роботов и незанятых мест, он активно отказывается от своего текущего местоположения, исследуя наибольшую плотность близлежащих незанятых мест в желаемой форме.
Исследование под названием «Исследование со средним сдвигом при сборке формы роя роботов» было опубликовано в журнале Nature Communications.
Эта идея реализована путём адаптации алгоритма среднего сдвига — метода оптимизации, широко используемого в машинном обучении для нахождения максимумов функции плотности.
Когда робот окружён другими роботами, а также у него есть информация о свободном месте поблизости, он исследует наибольшую плотность близлежащих незанятых мест нужной формы, определённую с помощью оптимизации среднего сдвига.
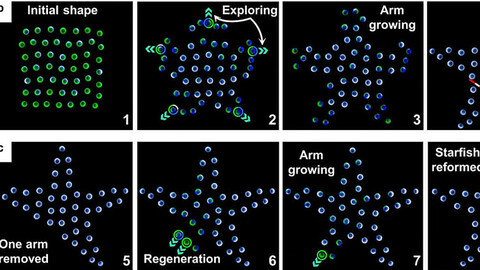
Предложенная стратегия была проверена в экспериментах с роем из 50 наземных роботов, что демонстрирует её потенциал для адаптации к интересному поведению, включая регенерацию формы, совместную транспортировку грузов и исследование сложной среды.
Источник: habr.com